The Mars Rover Team
2020-2021
![]()
The University Rover Challenge
The University Rover Challenge is an international competition where 36 teams are selected to build a rover and compete at a mock mars habitat located in the southern desert of Utah. Rovers must complete 5 missions to earn points.
Science Mission: This mission tests the rover’s capabilities for autonomously collecting soil samples and testing for the presents/absence of life using onboard sensors and probes.
Extreme Retrieval and Delivery Mission: This mission is a staged mission to test the rovers ability to pull/carry objects while navigating off road conditions and deliver assistance to astronauts.
Equipment Servicing Mission: Rovers will be required to perform several dexterous operations on a mock-up equipment system. The equipment servicing mission will involve delivering a cached science sample to a lander and performing maintenance on the lander, testing the rovers ability to use handheld tools to fix and manipulate objects.
Autonomous Navigation Mission: Rovers are tasked with autonomously traveling through the desert to predetermined locations and enter through a gate at each stage, testing the rover’s ability to safely navigate to GPS coordinates and use image processing to avoid obstacles and locate the location gates.

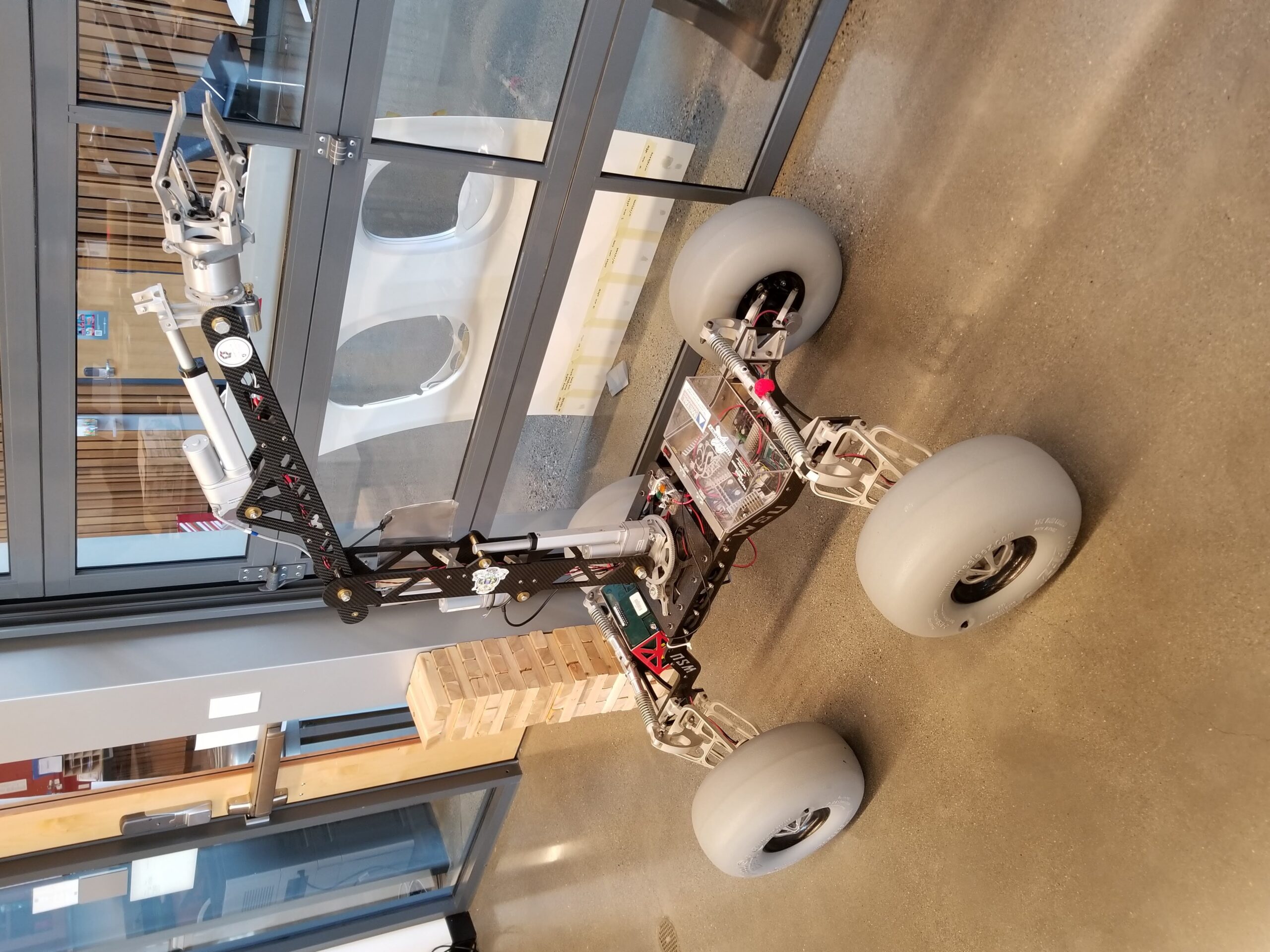
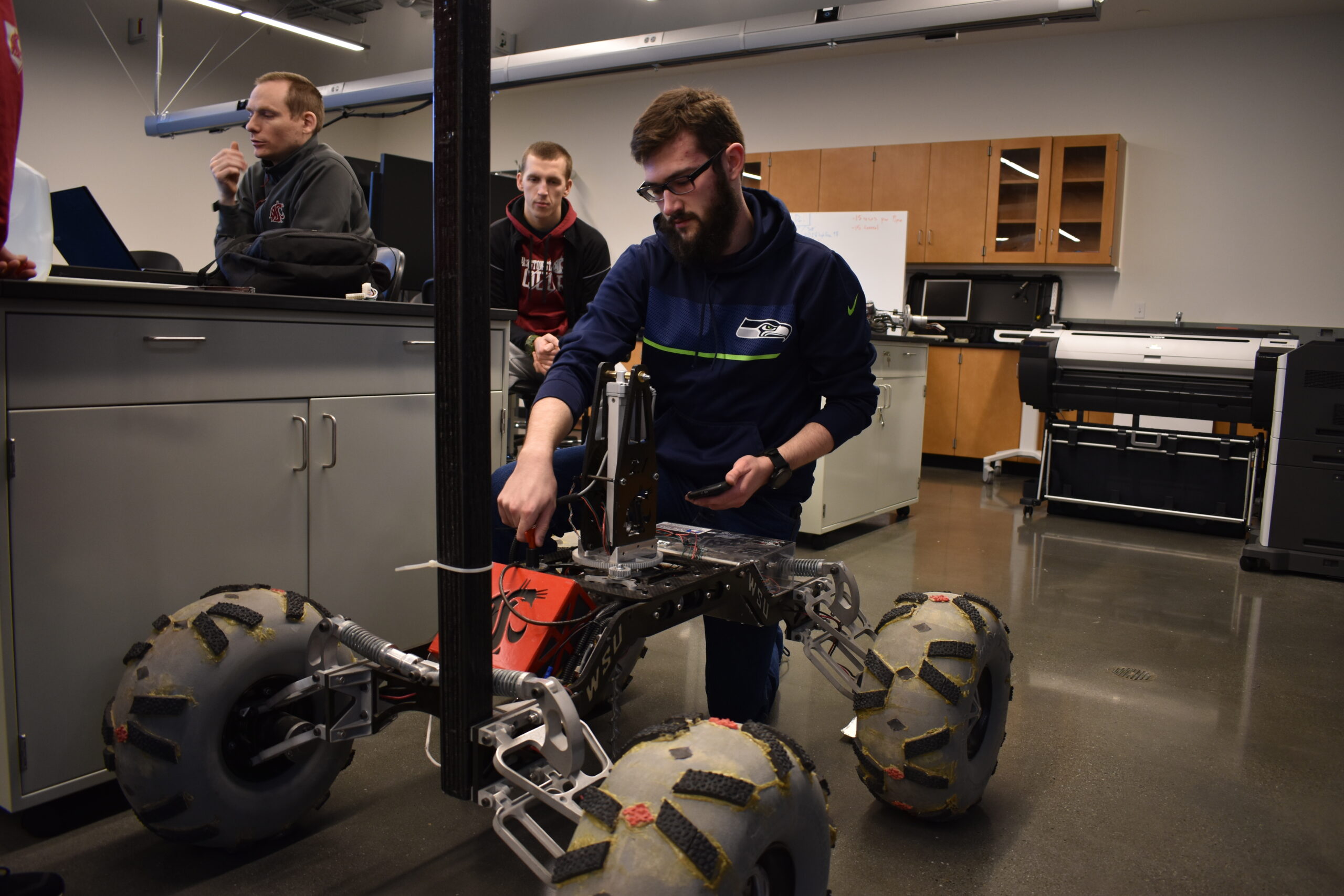
Mars Rover 3.0
The Mars Rover 3.0 is a large upgrade of the previous Mars Rover 2.0, which placed 2nd in the URC competition in 2016, as it takes all of the experienced learned from the old design for a lighter, smarter, and more powerful rover. The Mars Rover 3.0 design features:
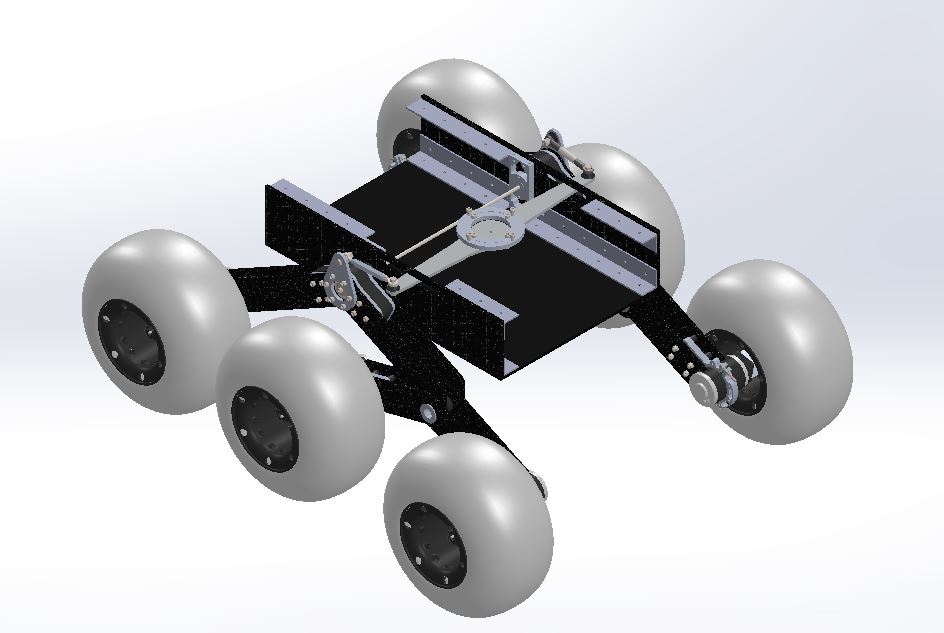
-Six individually powered wheels with an all-new rocker and boggy suspension design doubling the power of the wheels from the previous design and has much greater traction over off-road terrain.
-Redesigned arm design for high precision and use of commonly used tools like drills and screwdrivers. The hardware is not the only upgrade for the new design as new electrical systems and software have been made for smarter, faster, and more efficient control of the rover.
-New 64-bit controller powered by a small and light lithium-ion battery pack.
-New depth sensing camera and image processing software to allow the rover to navigate autonomously through any environment.
2019- Present
How You Can Help
Mechanical Engineering
Mechanical engineering members are involved in the design and structural analysis of new rover parts and assemblies. Also create manufacturing processes and fabricate carbon fiber, aluminum, and 3D printed parts.
Electrical Engineering
Electrical engineering members design and implement all the electrical systems on the rover. This includes the power and safety system, long distance communications, control systems, and integration of motors and actuators.
Software Engineering
Software engineering members develop the control software and use communication protocols to connect electrical systems together. Software is also being developed for the image processing of the new depth sensing camera and the autonomous control of the rover.

